Design A Matrix Of Translation With Homogeneous Coordinate System

Coordinate Transformations In Robotics Matlab Simulink Mathworks Benelux Coordinates Circuit Design Transformations
Computer Graphics Homogeneous Coordinates Javatpoint

Transformation Using Matrices Geometry Transformations Mathplanet

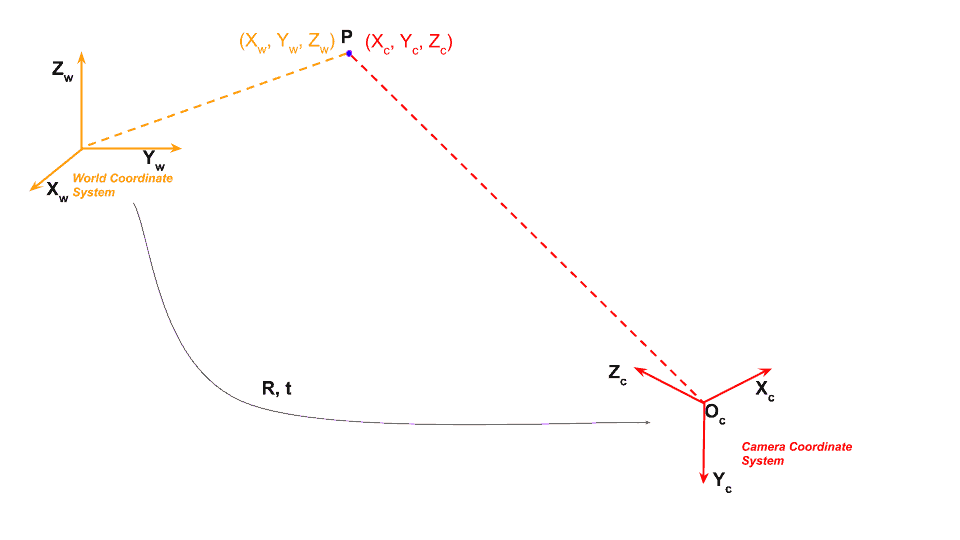
3d World To First Person Transformation Geometry Of Image Formation Coursera
Homogeneous Coordinates Mike On Matlab Graphics Matlab Simulink

Points And Transformations
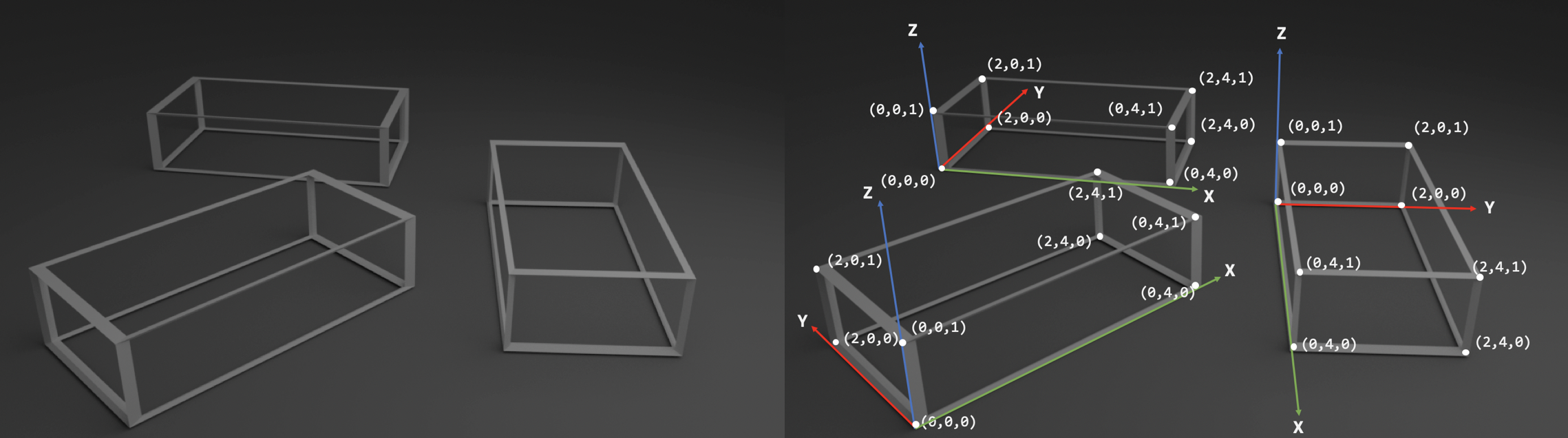
Translation columns specify the directions of the bodyʼs coordinate axes.
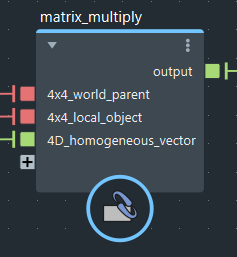
Design a matrix of translation with homogeneous coordinate system. In this way we can represent the point by 3 numbers instead of 2 numbers which is called homogenous coordinate system. Coordinate systems t initial coordinate system xyz final. Here we perform translations rotations scaling to fit the picture into proper position. Homogeneous coordinates 4 element vectors and 4x4 matrices are necessary to allow treating translation transformations values in 4th column in the same way as any other scale rotation shear transformation values in upper left 3x3 matrix which is not possible with 3 coordinate points and 3 row matrices.
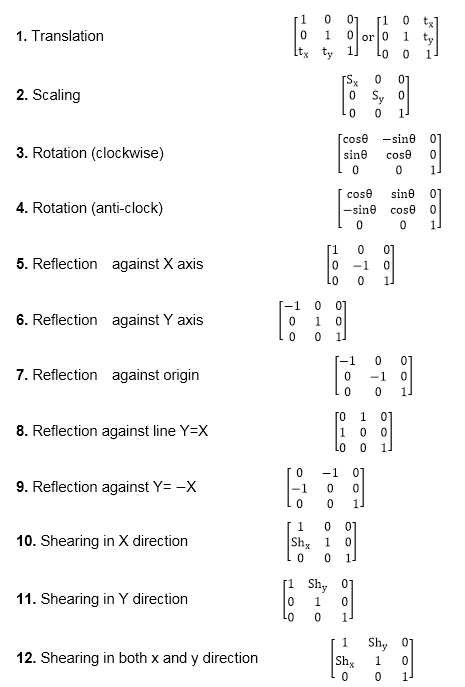
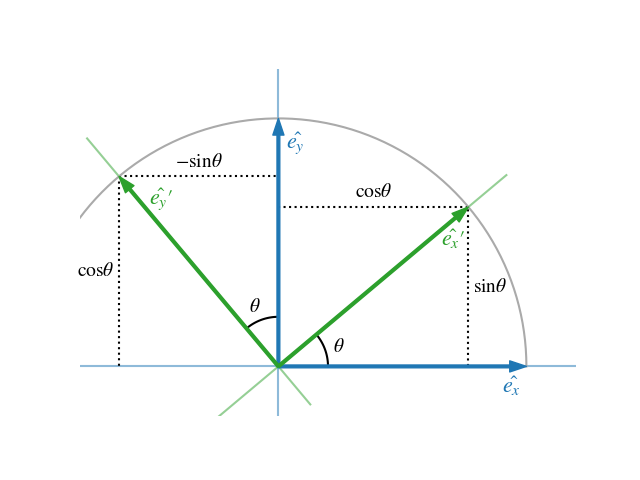
To represent affine transformations with matrices we can use homogeneous coordinates this means representing a 2 vector x y as a 3 vector x y 1 and similarly for higher dimensions using this system translation can be expressed with matrix multiplication. Translation three dimensional transformation matrix for translation with homogeneous coordinates is as given below. It specifies three coordinates with their own translation factor. Applying a rotation rot θ1 θ2 followed by a translation trans dcosθ1 dsinθ1.
Homogeneous coordinates are generally used in design and construction applications. Like two dimensional transformations an object is translated in three dimensions by transforming each vertex of the object. N 1a n homogeneous transformation matrix which relates the coordinate frame of link n to the coordinate frame of link n 1. Example of representing coordinates into a homogeneous coordinate system.
For two dimensional geometric transformation we can choose homogeneous parameter h to any non. The functional form. The 3x3 matrix a represents scale and rotation the 3d vector t represents translation using homogeneous coordinates all affine transformations are represented with one matrix vector multiplication affine transformations. In mathematics homogeneous coordinates or projective coordinates introduced by august ferdinand möbius in his 1827 work der barycentrische calcul are a system of coordinates used in projective geometry as cartesian coordinates are used in euclidean geometry they have the advantage that the coordinates of points including points at infinity can be represented using finite coordinates.
Hand origin basea 1 x 1 a 2 2a 3 x 3a 4 x 4a 5 x 5 hand origin where. All ordinary linear transformations are included in the set of. Given the u v coordinate of a point p with respect to the second link the x y coordinates of p in the world coordinate system is 1a square matrix qis orthogonalif qqt tq i.

Vector Graphics Three Dimensional Homogeneous Coordinates A First Course In Electrical And Computer Engineering Openstax Cnx

Pbr Textures To Maya Arnold Renderman Vray Redshift Workflow By Aeolian Yang Pbr Maya Texture
B Sc Csit Computer Graphics Unit 2 By Tekendra Nath Yogi

2 2 3 Coordinate Transformations In 2 D Robotics Programming Study Guide
Changing Coordinate Systems To Help Find A Transformation Matrix Video Khan Academy
Http Home Iitk Ac In Jrkumar Download Me761a Lecture 203 20geometric 20transformation Pdf

Working With Matrices Apple Developer Documentation
Project 3 Camera Projection Matrix And Fundamental Matrix Estimation With Ransac
Creating A Rotation Matrix In Numpy
Transformation Matrices Reflection The Line Y X Examsolutions Maths Tutorials Youtube

The Print Guide Halftone Screen Angles Screen Printing Tutorial Screen Printing Diy Screen Printing
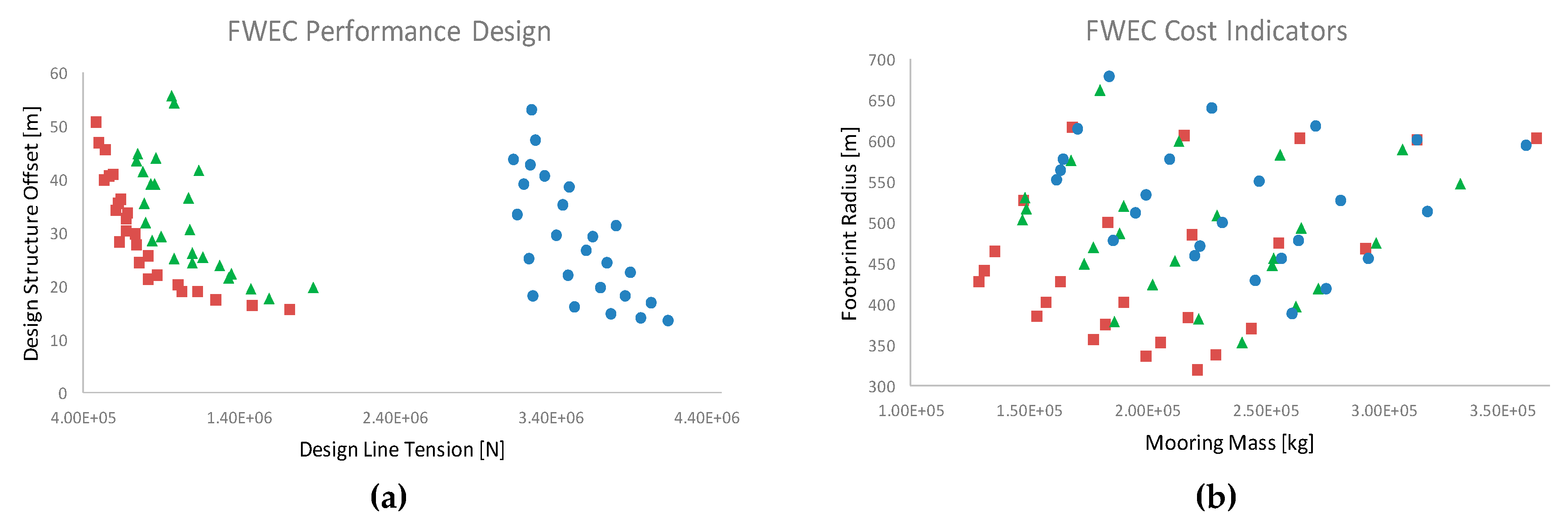
Jmse Free Full Text A Comparison Of Numerical Approaches For The Design Of Mooring Systems For Wave Energy Converters Html
Https Cseweb Ucsd Edu Classes Wi18 Cse167 A Lec3 Pdf

Build A 4 Dof Robotic Arm Part 2 Circuit Cellar
Https Scholarworks Uno Edu Cgi Viewcontent Cgi Article 3698 Context Td
Geometry Of Image Formation Learn Opencv
Https Hal Archives Ouvertes Fr Hal 01964675 Document
Okjmys5ft6m Hm
Https Encrypted Tbn0 Gstatic Com Images Q Tbn 3aand9gctuk8 5s T69hckv3efyqrok42cufl0xdshivepbyjolzyin8fj Usqp Cau
Http Insightsoftwareconsortium Github Io Simpleitk Notebooks Python Html 21 Transforms And Resampling Html

Design Strategy And Issues Of The Delthaptic A New 6 Dof Parallel Haptic Device Sciencedirect
Https Ieeexplore Ieee Org Iel7 6287639 6514899 07895129 Pdf
Work With Matrices And Transforms Maya 2020 Autodesk Knowledge Network

Digital Microfluidics Wikipedia

Image Geometric Transformation In Numpy And Opencv By Daryl Tan Towards Data Science
Computer Graphics Quick Guide Tutorialspoint

The Shapely User Manual Shapely 1 8dev Documentation
Estimate Camera Projection Matrix From World To Image Point Correspondences Matlab Estimatecameramatrix
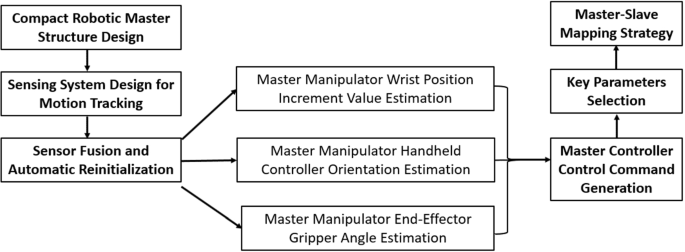
Hamlyn Crm A Compact Master Manipulator For Surgical Robot Remote Control Springerlink
Https Ieeexplore Ieee Org Iel7 42 4359023 08721167 Pdf
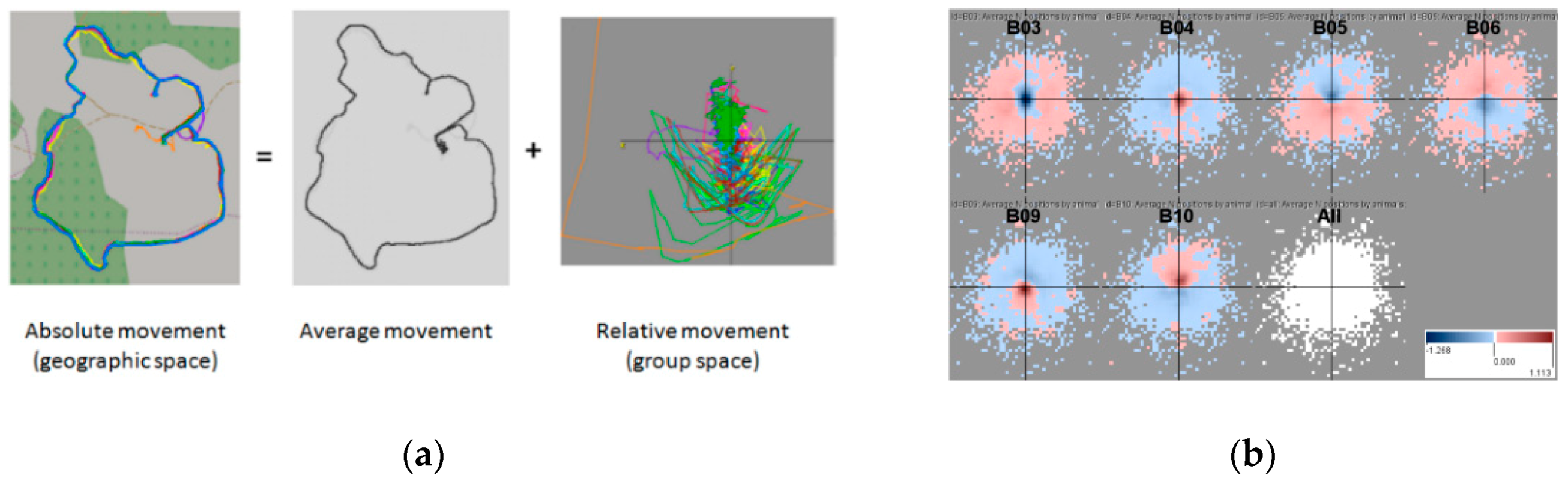
Ijgi Free Full Text Diverse Visualization Techniques And Methods Of Moving Object Trajectory Data A Review Html
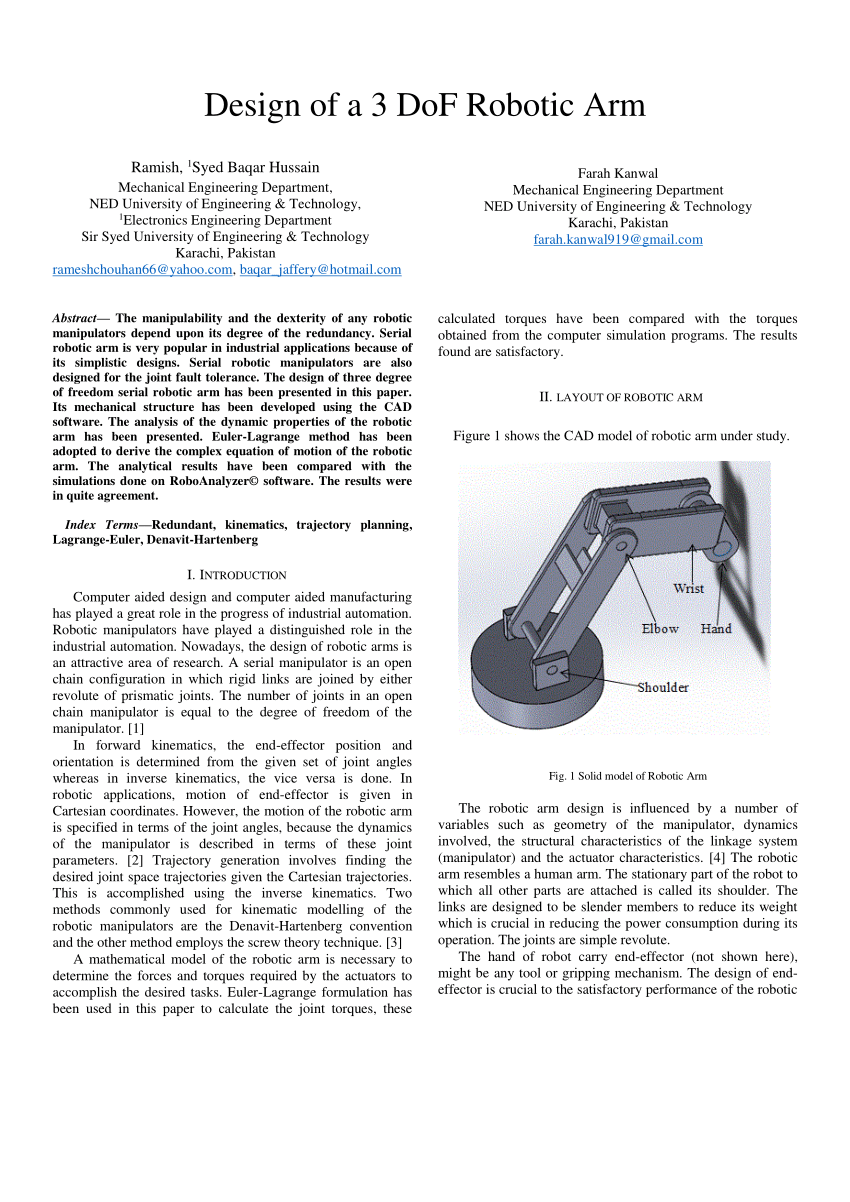
Pdf Design Of A 3 Dof Robotic Arm
Https Dspace Mit Edu Bitstream Handle 1721 1 120855 Sensors 19 00765 Pdf Sequence 1 Isallowed Y

Advancements In Multi Objective And Surrogate Assisted Grin Lens Design And Optimization
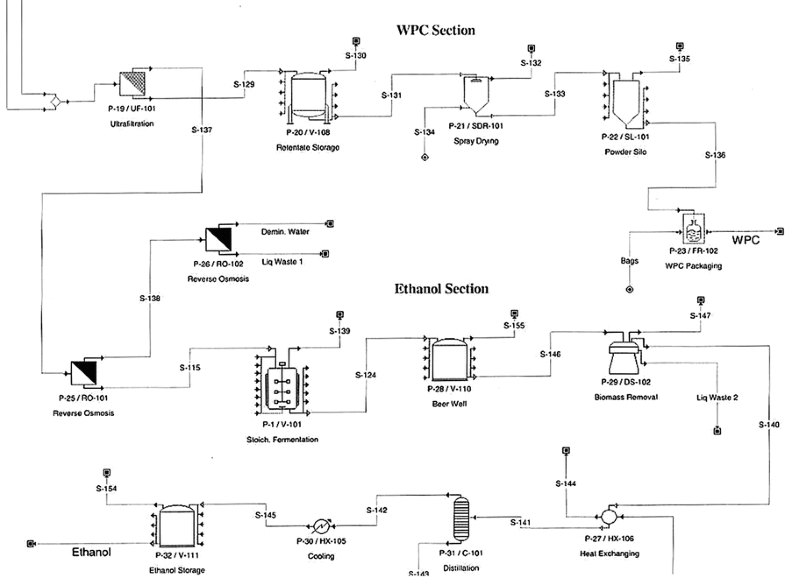
Use Of Computers In The Design Of Food Manufacturing Facilities Springerlink
Https Ieeexplore Ieee Org Iel7 41 8752485 08605500 Pdf
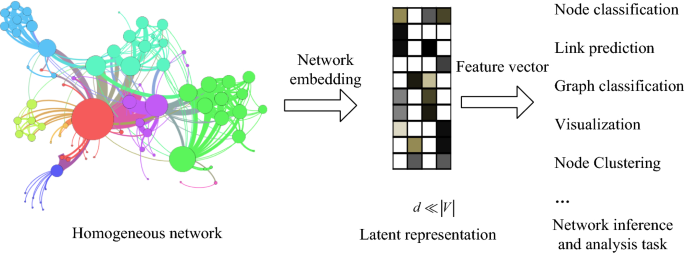
Network Representation Learning A Systematic Literature Review Springerlink

3d Graphics With Opengl The Basic Theory
Https Www Ajol Info Index Php Mjst Article View 185782 175084
Https Arxiv Org Pdf 1801 04108

A Generative Algorithm For De Novo Design Of Proteins With Diverse Pocket Structures Biorxiv

